Air Filled Membrane Structure Room Sprayed by Mechanical Arm
Digital FabricationCollabrator: Zihuan Zhang, Wenzhuo Cai, Yuting Chen, Shiyu Qiu, Yichao Shi, Fazhuo Zhang, Sheng Fang
Instructor: Yunsheng Su, Kangyi Zheng
Role: Design printing paths in different membrane structures, generate the spray patterns, and monitor the robots printing the routes.
Toolkits: Rhino, Grasshopper, Kuka Robotics
Workshop: DigitalFUTURES 2021
Year: 2021
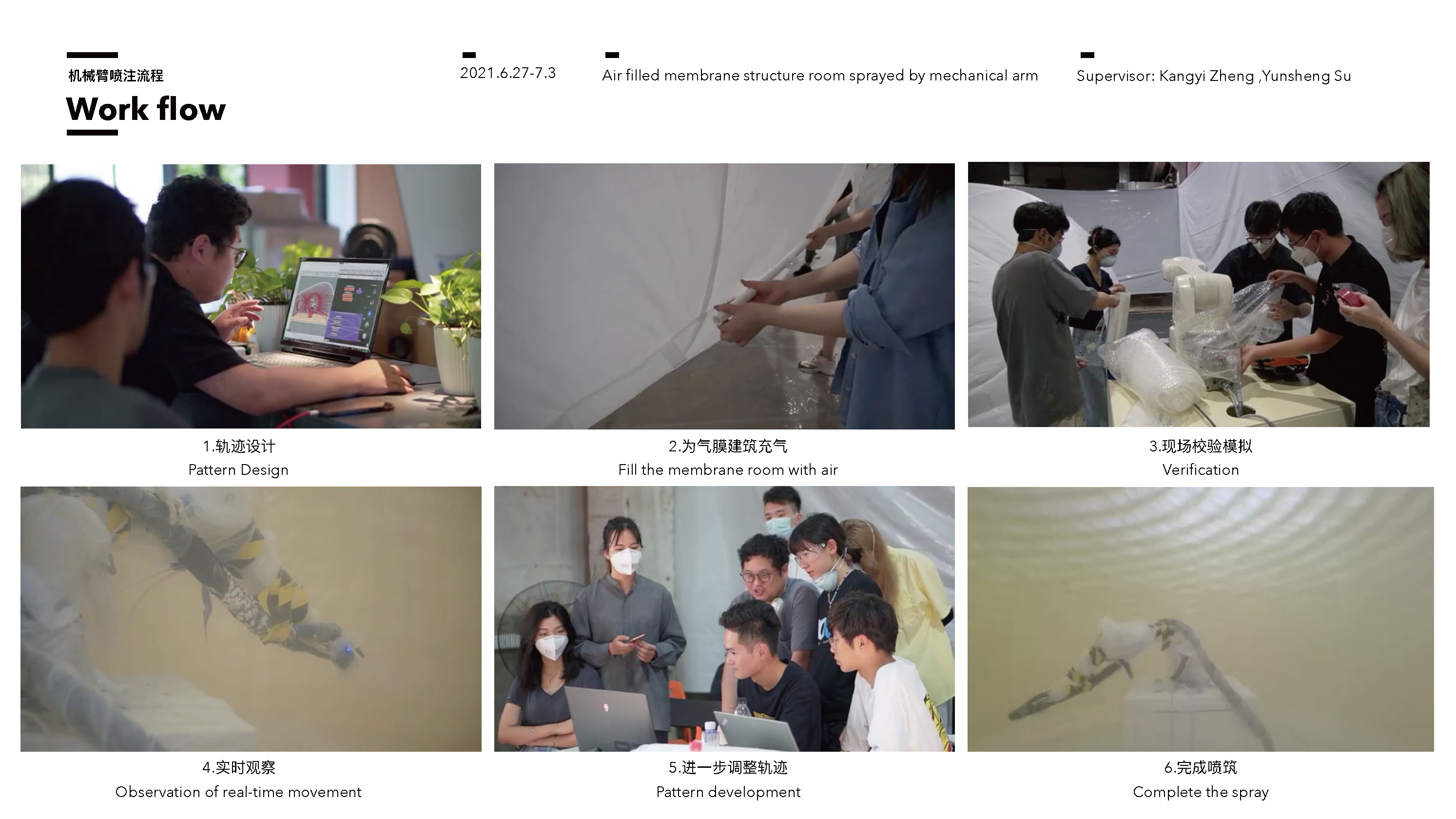
This project is one of the on-site built workshops in Digitalfutures in Tongji University, Air filled membrane structure room sprayed by mechanical arm.
I explored the possibilities of construct spray path with parametric approach. We started from digital pattern design, while the construction group fill the membrane room with air. After that, we did the on-site verification and observation to develop the path for robotic arm. The air membrane would change shape due to the changing air pressure.
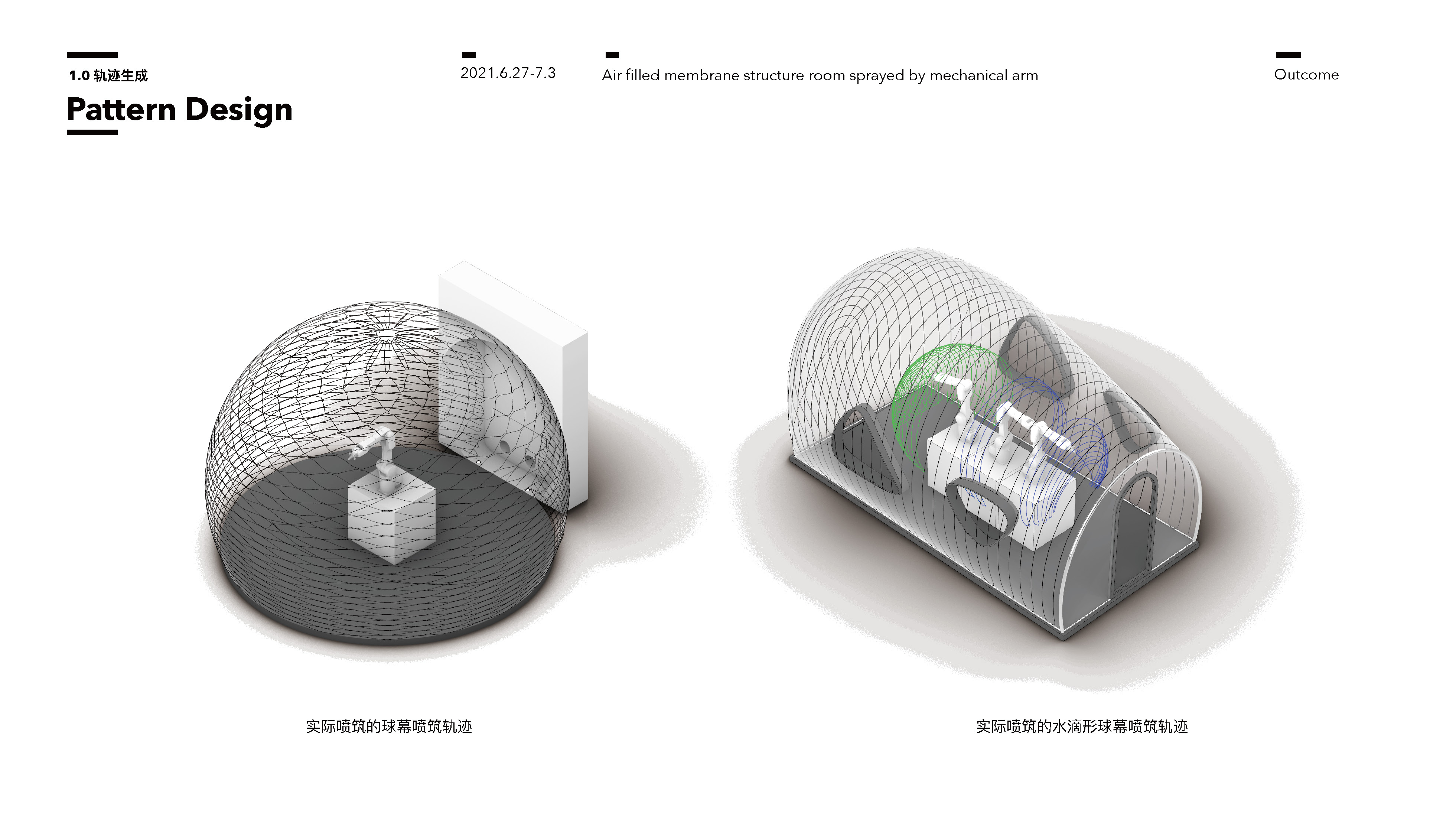
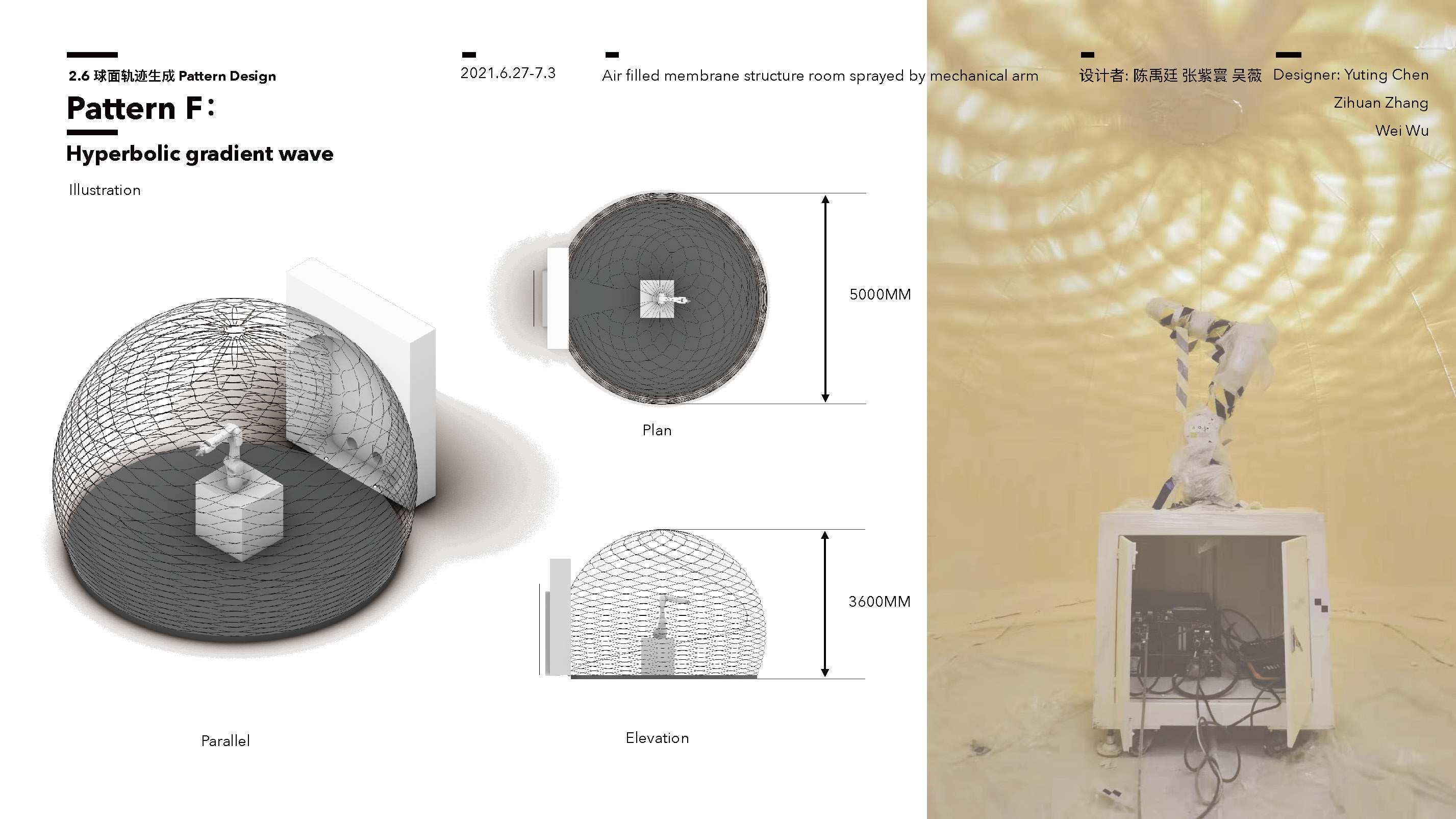
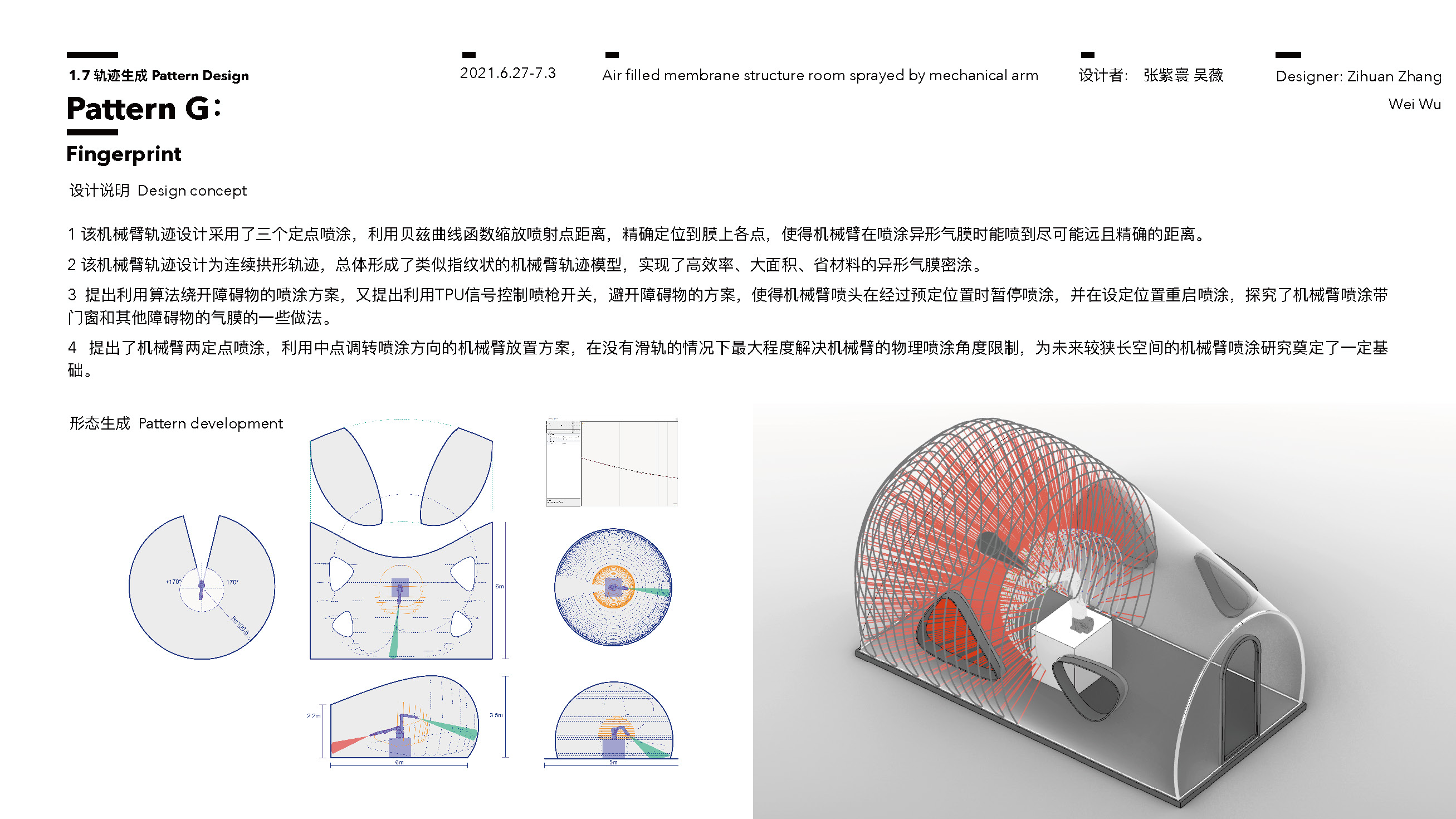
Taking into account of the structural characteristics of spraying technology and aesthetics, we finally sprayed two patterns seperately for sphere and water drop air membranes. Using cells and fingerprints as inspirations.
I explored the possibilities of construct spray path with parametric approach. We started from digital pattern design, while the construction group fill the membrane room with air. After that, we did the on-site verification and observation to develop the path for robotic arm. The air membrane would change shape due to the changing air pressure.
Taking into account of the structural characteristics of spraying technology and aesthetics, we finally sprayed two patterns seperately for sphere and water drop air membranes. Using cells and fingerprints as inspirations.
We tested the curve tension in kangaroo. After several iterations, we chose the final one with a gradient of wavy pattern. This design satisfies the requirements for the bottom tamping of the air-filled sprayed pavilion. In order to support the sphere itself in the most stable way, we started the spray procedure from the bottom, with the bottom much thicker than the upper part. The overlapping components can stabilize sphere and decrease the shape morphing in strong liquid spraying.
This design can meet the requirements of the spraying behavior of robotic arm. In the meantime, it gives an appropriate time and temperature to initiate a chemical reaction of polyurethane when spraying the whole structure from bottom to top.
This design can meet the requirements of the spraying behavior of robotic arm. In the meantime, it gives an appropriate time and temperature to initiate a chemical reaction of polyurethane when spraying the whole structure from bottom to top.