

Premeditated Glitch
XR, Art, Digital FabricationConference: ACADIA 2022
Software support: Riley Studebaker
Material support: Claire Moriarty
Toolkits: Rhino, Grasshopper, ABB 6-axis Robot, HTC Vive VR controller
Year: 2022

Premeditated Glitch utilizes advanced technologies such as body-tracking software, real-time robotic control, and neural networks to create a unique and innovative approach to painting and custom-cast metal sculptures. The system can analyze and reanalyze gesture paths in real-time by simulating, interpreting, optimizing, and co-creating human painting gestures. The robotic arm mimics and optimizes human drawing movements while occasionally providing more efficient drawing techniques to reduce its movement path. However, due to its design constraints, it often creates symmetrical elements on the paper, such as a perfect circle, whenever they make significant turns. Consequently, the artwork contains the replication of the human's bodily motion and the robot's "subjective" consciousness. As such, the two entities collaborated to produce the final piece.
Session_1: Plaster Spraying




Intended straight lines
![]() Adjusted spin and Unexpected nozzle leaking
Adjusted spin and Unexpected nozzle leaking![]() Adjusted spin and inteded circles
Adjusted spin and inteded circles
 Adjusted spin and Unexpected nozzle leaking
Adjusted spin and Unexpected nozzle leaking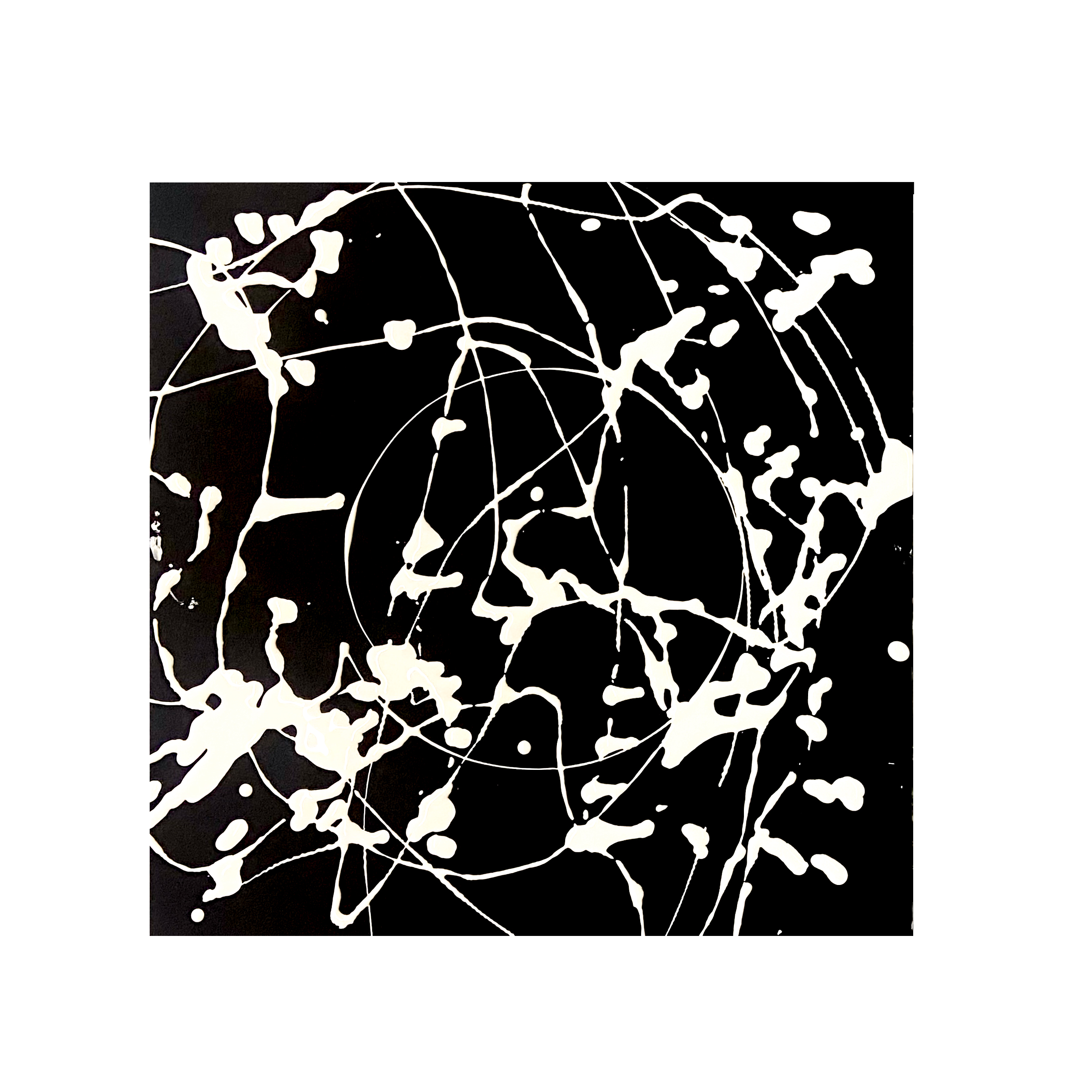 Adjusted spin and inteded circles
Adjusted spin and inteded circles
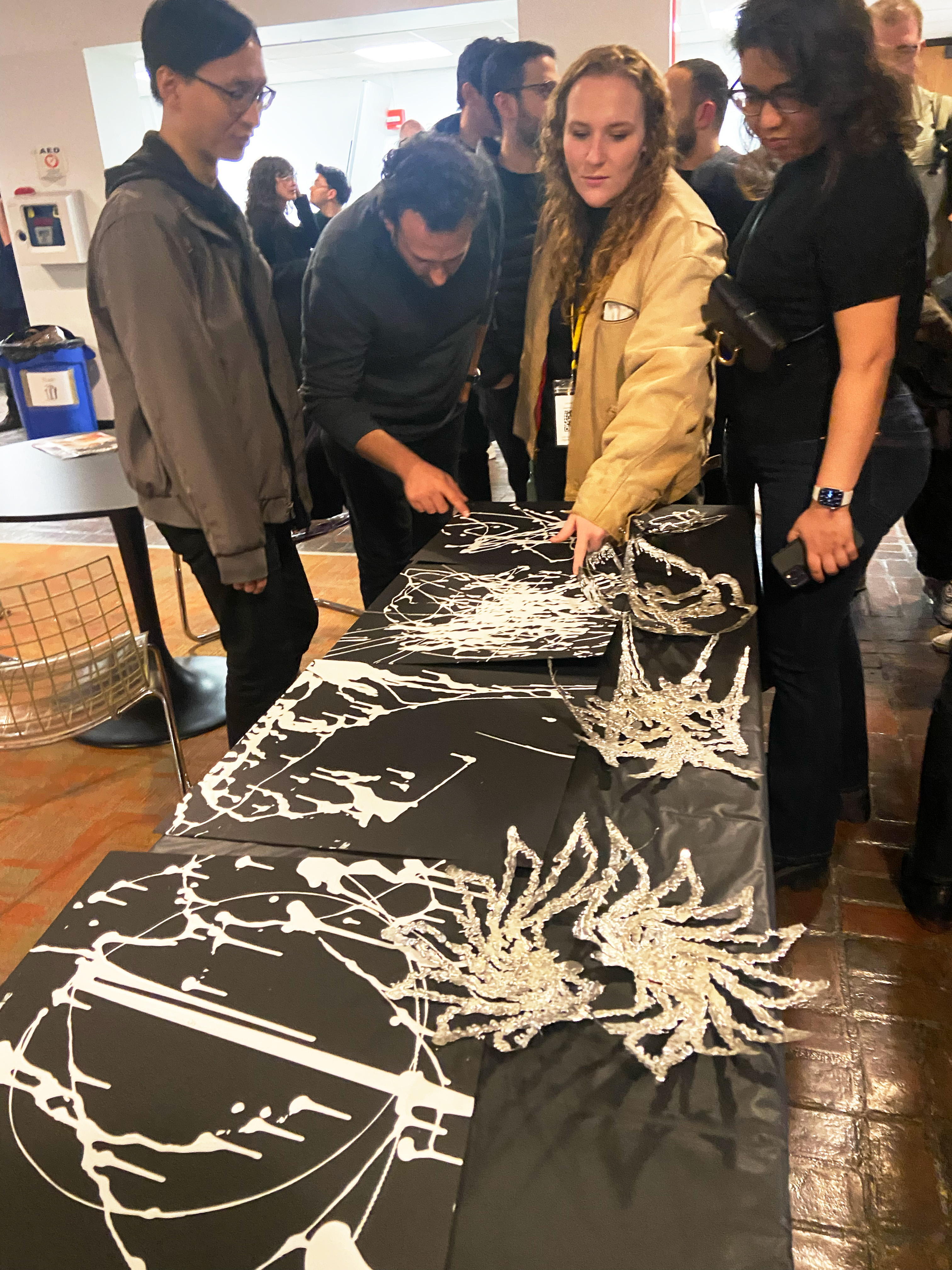
Premeditated Glitch, Robotic + motion capture printing
Plaster on black sheet boards, 2022
Plaster on black sheet boards, 2022
Session2: Pewter Pouring Sculpture
Robotic Simulation
![]()
Robotic pouring recording in thermal camera
Pouring Results


Pewter pouring test_001, gesture learning from “Intended straight lines”
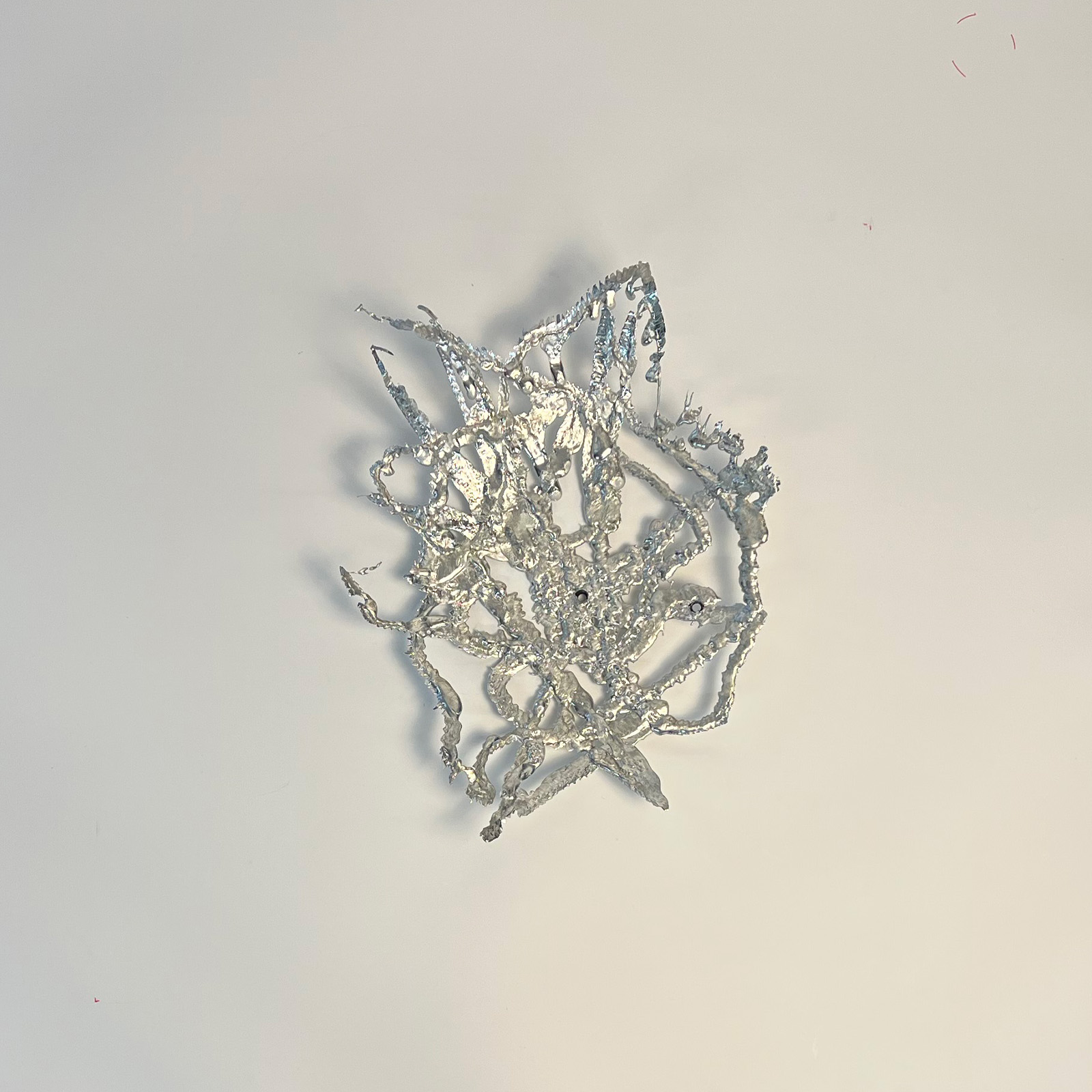
Pewter pouring test_002, gesture learning from “Intended straight lines”
Me examine the robotic printing results
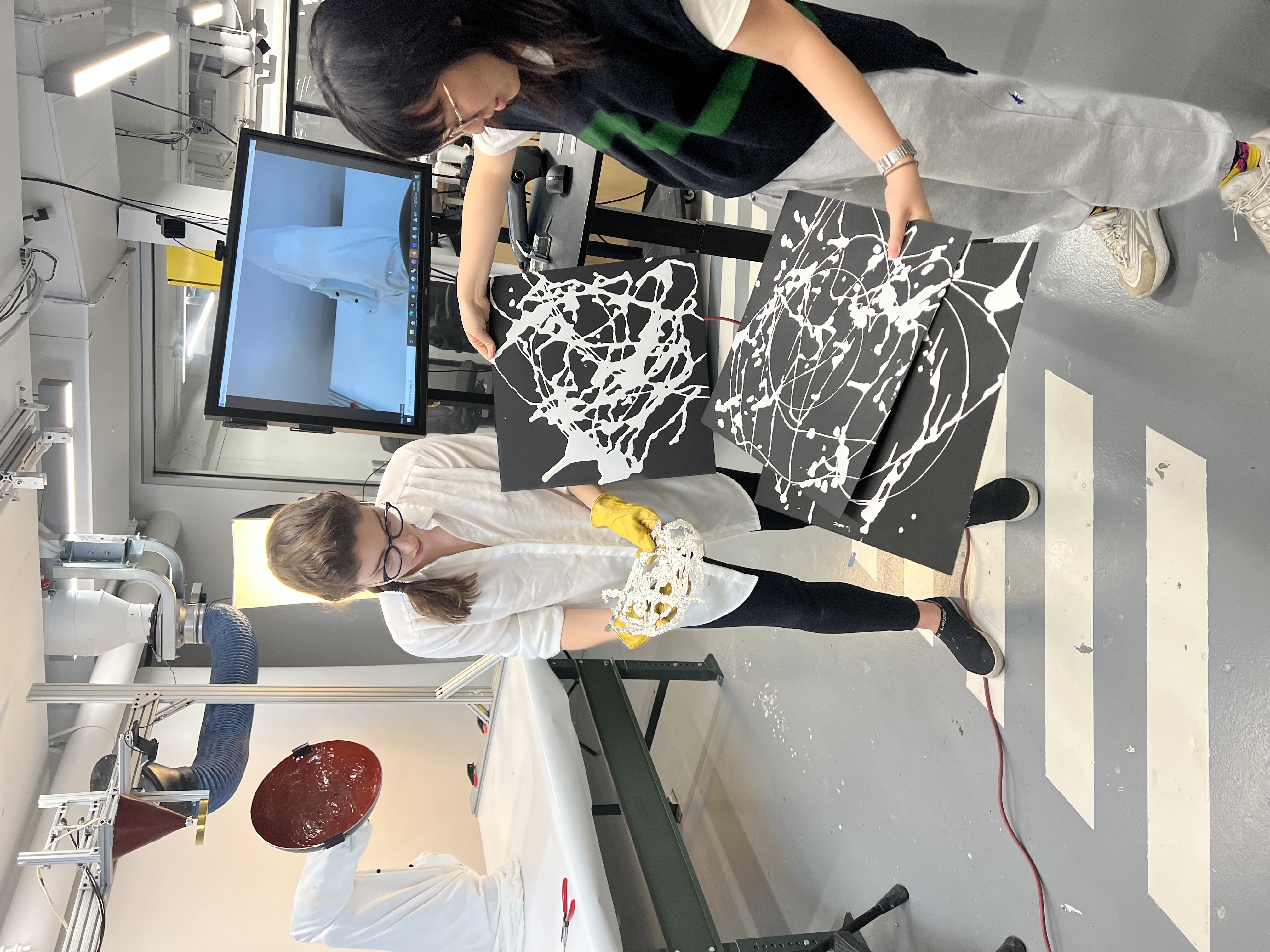
Me examine the robotic pouring results

Exhibition

ACADIA (Association for Computer Aided Design in Architecture) , Philadelphia, PA
Oct 26, 2022
ACADIA (Association for Computer Aided Design in Architecture) , Philadelphia, PA
Oct 26, 2022

:iidrr Gallery, New York, NY
Feb 22-26, 2023

:iidrr Gallery, New York, NY
Feb 22-26, 2023