

A Molten Gesture:
Expanding 'Hand-Craft' Through Body Tracking and Robotic Arms
XR, Motion Capture, Digital FabricationInstructor: Riley Studebaker, Claire Moriarty
Role: Designed pouring logics, motion capture, generated the body motion routes and reprinted by robotic arms, studied the difference and optimized the patterns.
Toolkits: Rhino, Grasshopper, ABB 6-axis Robot, HTC Vive
Workshop: Acadia 2022
Year: 2022

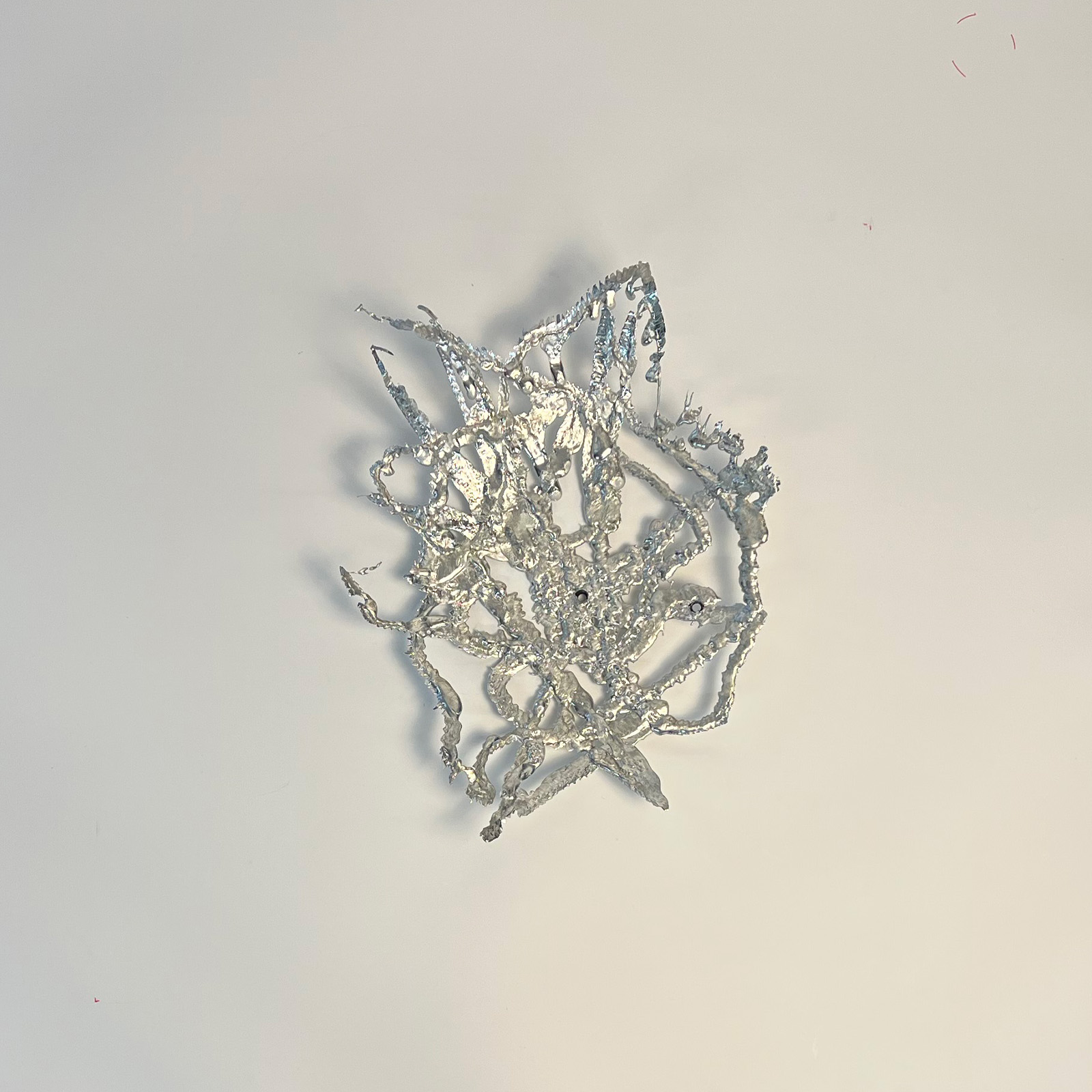
This project utilizes advanced technologies such as body-tracking software, real-time robotic control, and neural networks to create a unique and innovative approach to painting and custom-cast metal sculptures. The system can analyze and reanalyze gesture paths in real-time by simulating, interpreting, optimizing, and co-creating human painting gestures. The result is a fascinating robotic simulation that allows users to control the creation of custom-cast metal sculptures in a previously impossible way.
Objects made by the human hand are inherently seductive. This workshop explores an augmentation of bodily agency in fabrication using computation and robotics to bring hazardous processes into this realm of hand-craft. Participants will use body-tracking software, real-time robotic control, and methods of neural network-based gestural redistribution to create a bespoke poured metal lighting element. Each lighting element will be specific to a site chosen by the participant, and create directly responsive light and shadow. Participants will make a series of gestural studies in dripped metal using real-time VR control of a robotic arm. A selection of these physical results will be mapped around the surface of the final pendant light using artificial neural networks for final robotic fabrication, redistributing the arrangement of dripped metal, porosity, and intrinsic and familiar qualities of the maker’s hand, for a responsive and bespoke lighting effect and an object that challenges the conception of hand-craft.
Session_001: Plaster Printing Studies




Intended straight lines
![]() Adjusted spin and Unexpected nozzle leaking
Adjusted spin and Unexpected nozzle leaking![]() Adjusted spin and inteded circles
Adjusted spin and inteded circles
 Adjusted spin and Unexpected nozzle leaking
Adjusted spin and Unexpected nozzle leaking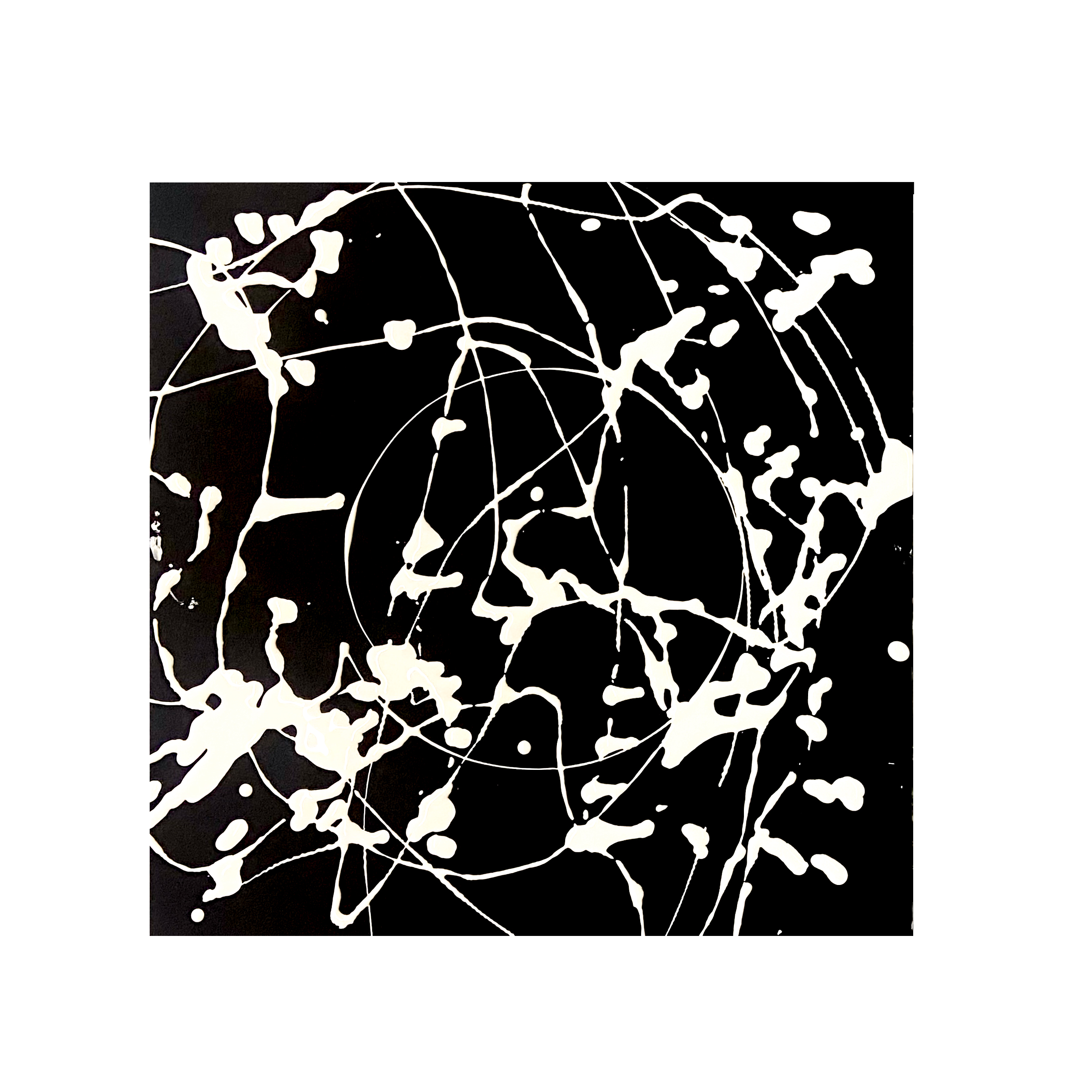 Adjusted spin and inteded circles
Adjusted spin and inteded circles
Premeditated Glitch, Robotic + motion capture printing
Plaster on black sheet boards, 2022
Plaster on black sheet boards, 2022
Session_002: Pewter Pouring Studies
Robotic Simulation
![]()
Robotic pouring recording in thermal camera
Pouring Results


Pewter pouring test_000

Pewter pouring test_001, gesture learning from “Intended straight lines”
Pewter pouring test_002, gesture learning from “Intended straight lines”
Me examine the robotic printing results
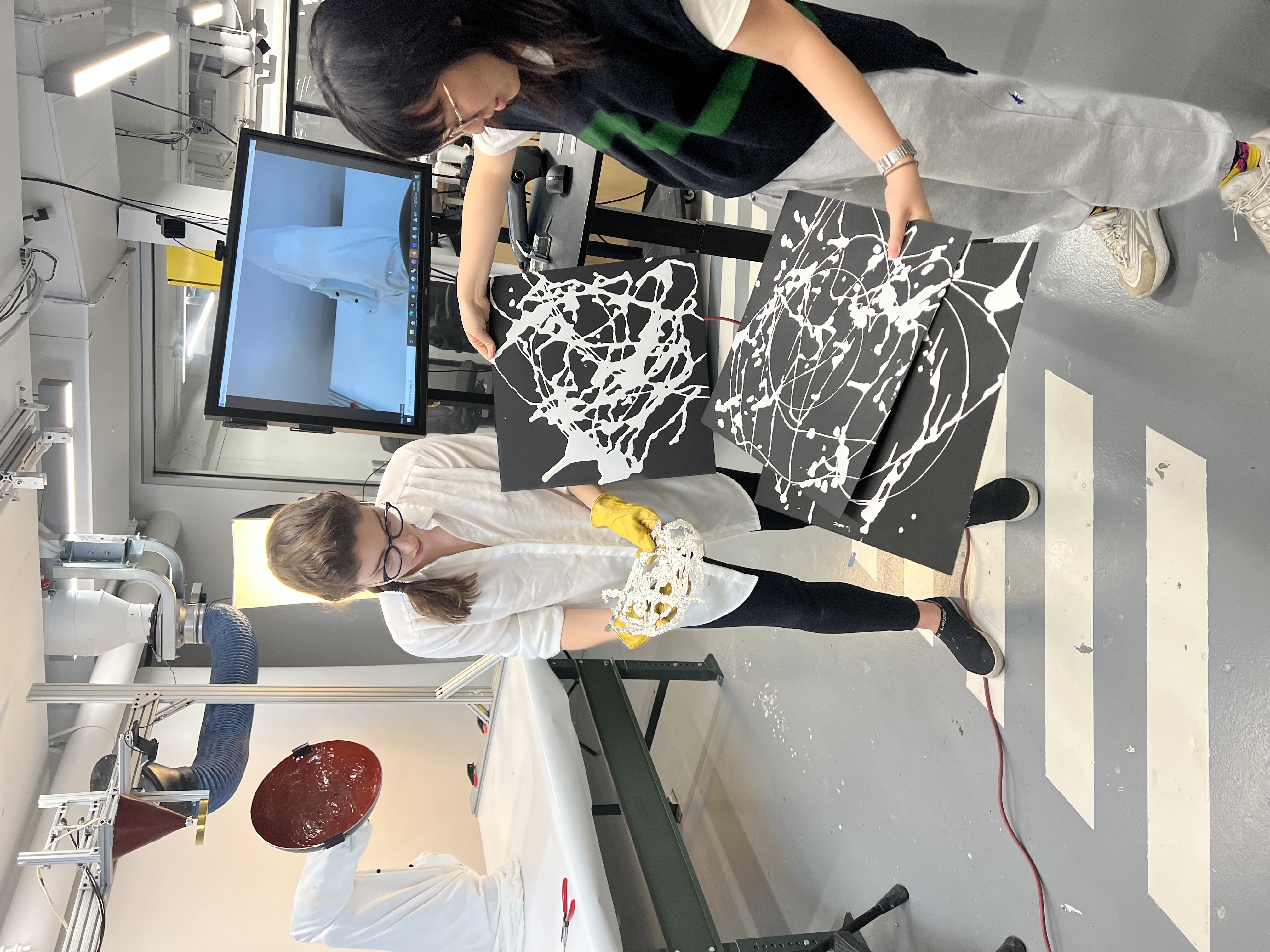
Me examine the robotic pouring results

Exhibition

ACADIA (Association for Computer Aided Design in Architecture) , Philadelphia, PA
Oct 26, 2022
ACADIA (Association for Computer Aided Design in Architecture) , Philadelphia, PA
Oct 26, 2022

:iidrr Gallery, New York, NY
Feb 22-26, 2023

:iidrr Gallery, New York, NY
Feb 22-26, 2023